FIOR & GENTZ
Gesellschaft für Entwicklung und Vertrieb von orthopädietechnischen Systemen mbH
Dorette-von-Stern-Straße 5
D-21337 Lüneburg
Tel.: +49 4131 24445-0
Fax: +49 4131 24445-57
E-Mail: info(at)fior-gentz.de
Beratung und Technischer Support

KAFO Alignment Guidelines
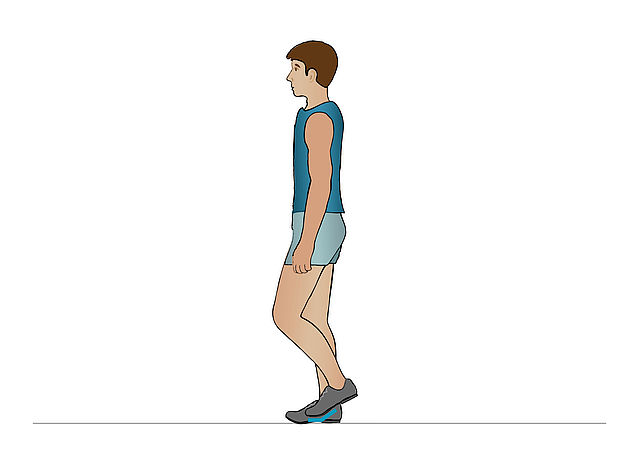
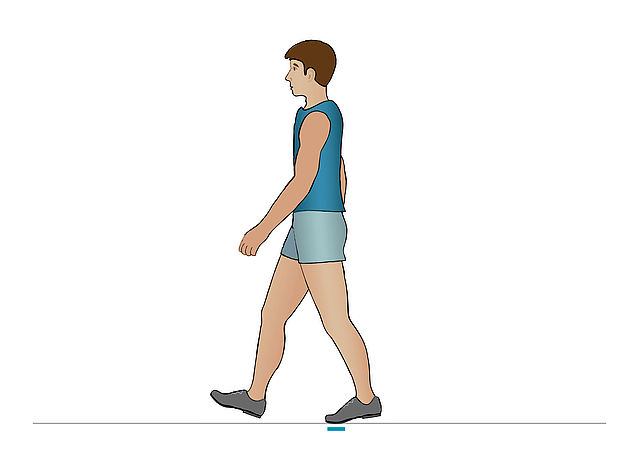
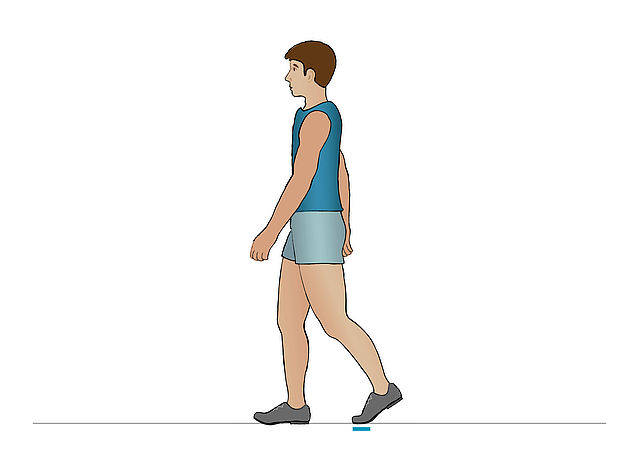
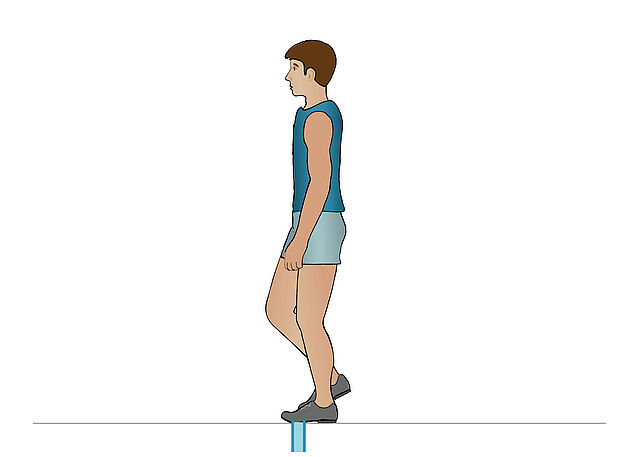
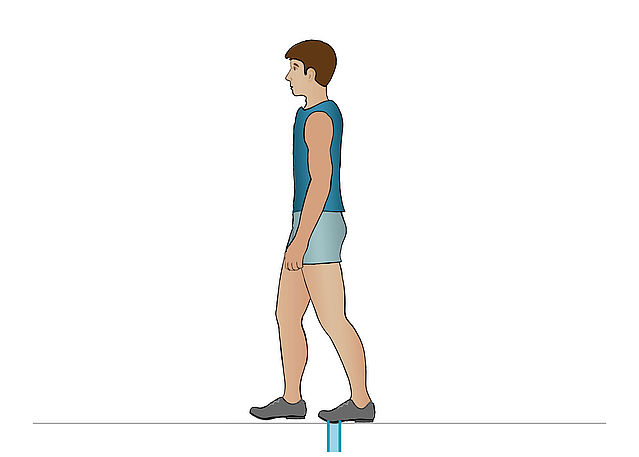
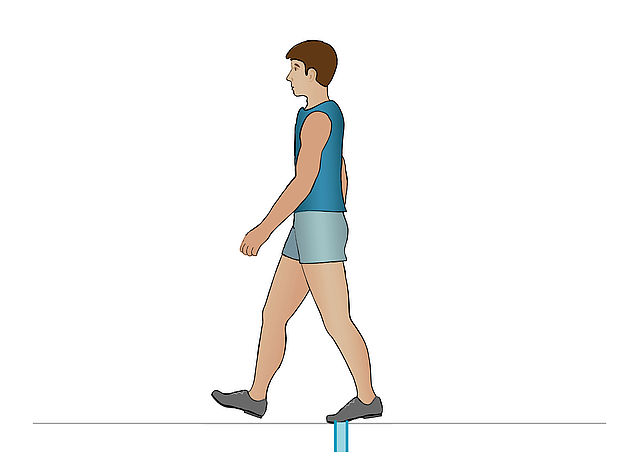
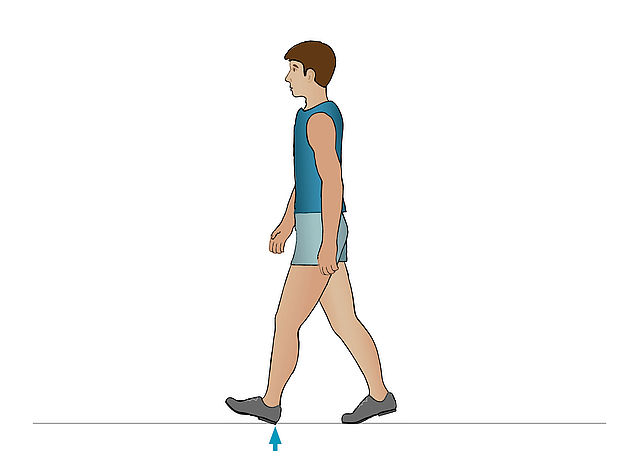
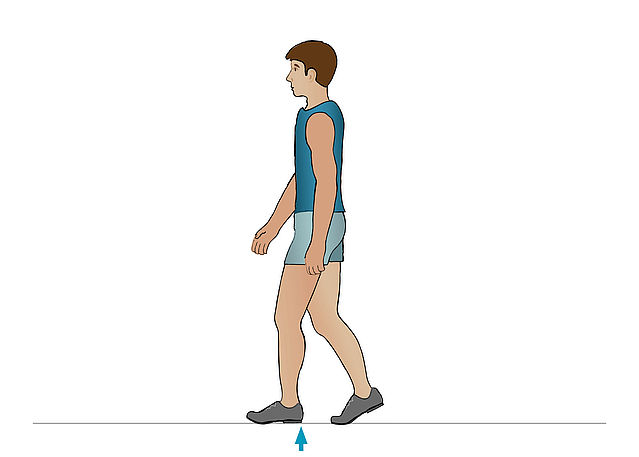
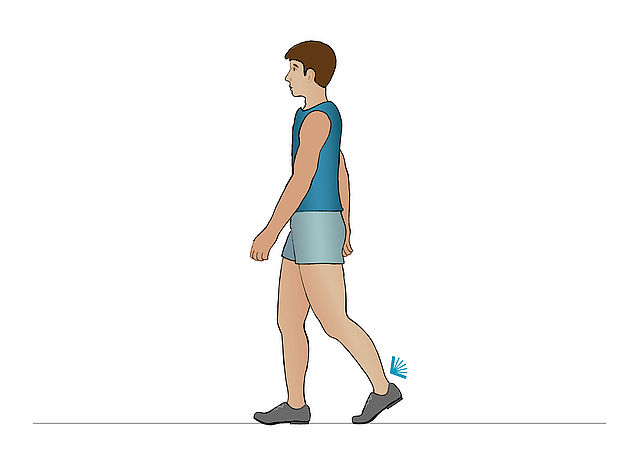
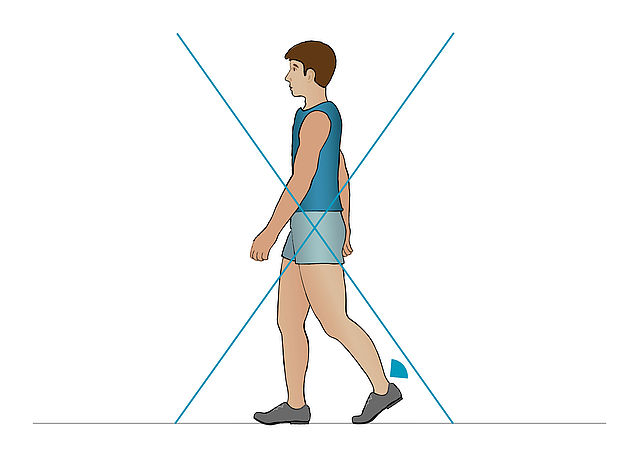
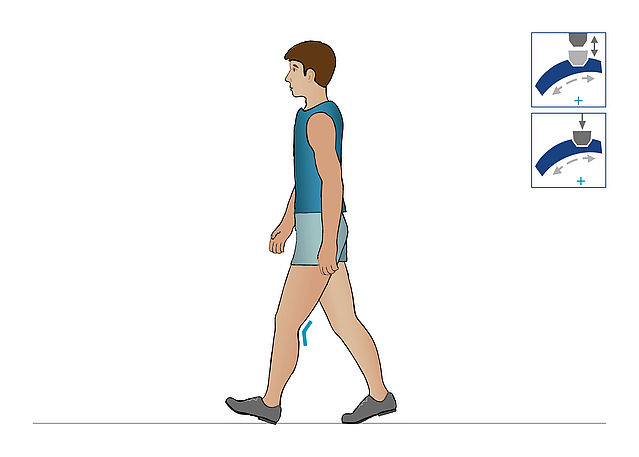
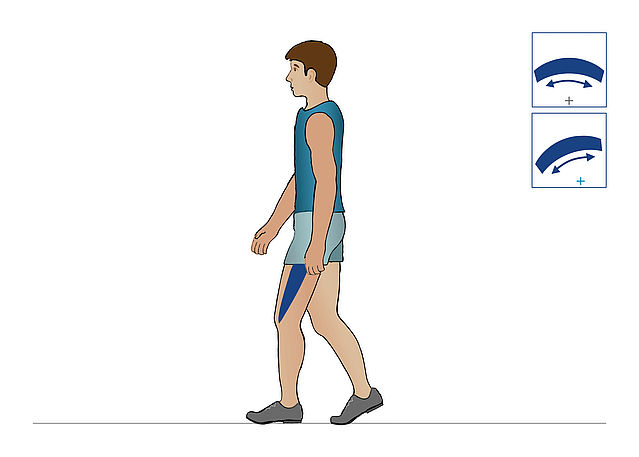
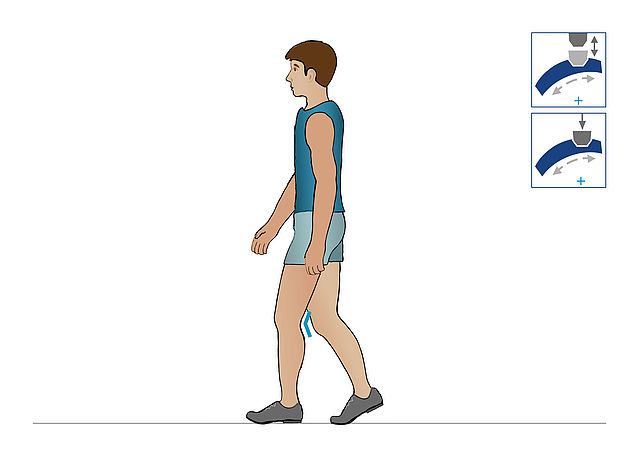
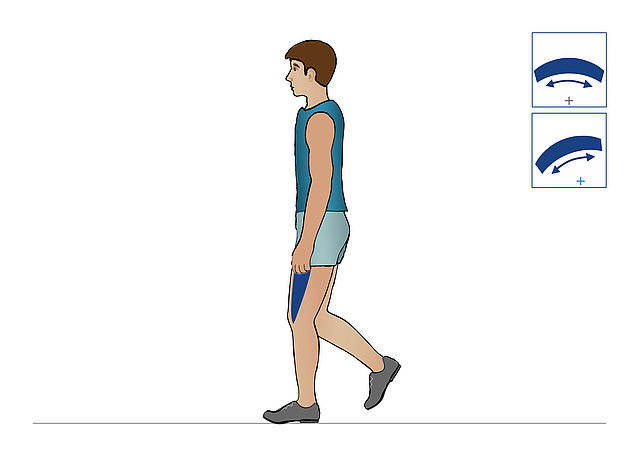
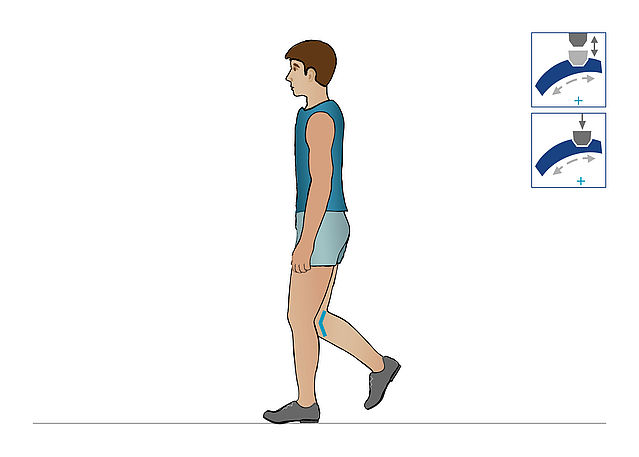
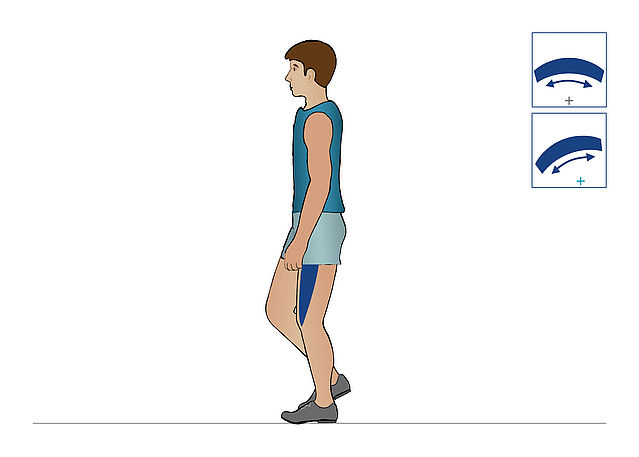
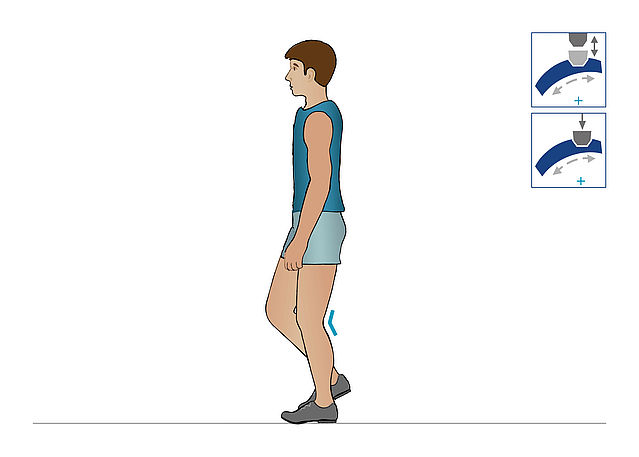
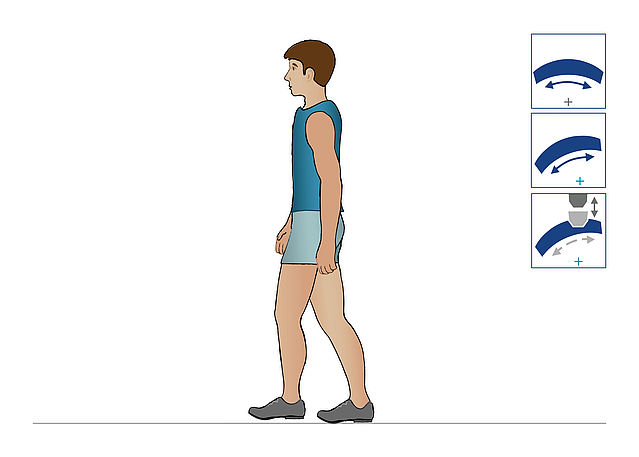
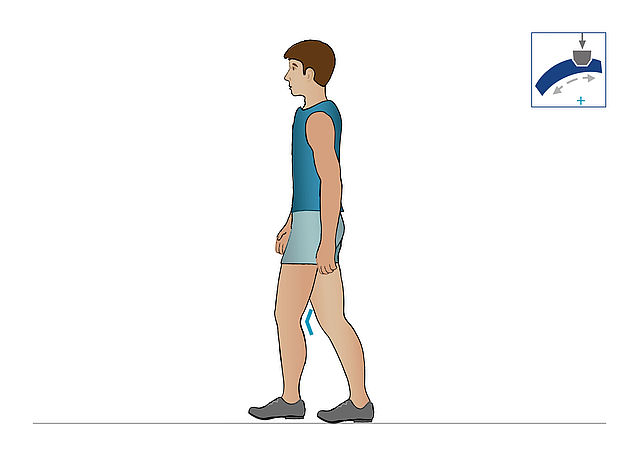
A correct alignment is critical for a functional orthosis. To ensure that the patient walks safely in all gait phases, the different orthosis construction characteristics and how they affect the overall orthosis’ alignment, and thus the patient as well, must already be considered when the orthosis is being planned.
This online tutorial reflects the alignment of a KAFO (Knee Ankle Foot Orthosis) and the effects through varied adjustments during the various gait phases.
-
KAFO Alignment Guidelines
-
Step 1/2
Step 2/2


-
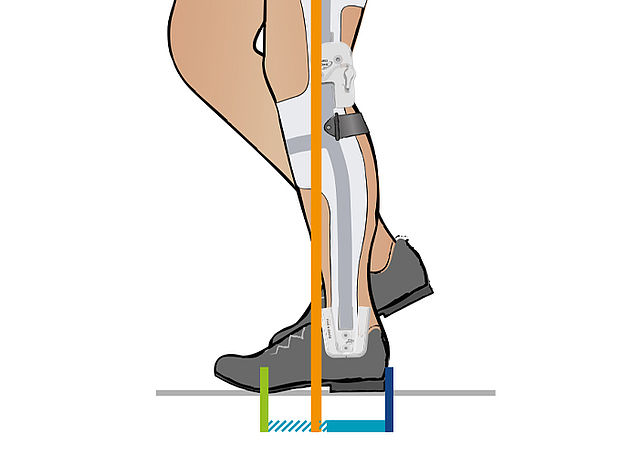
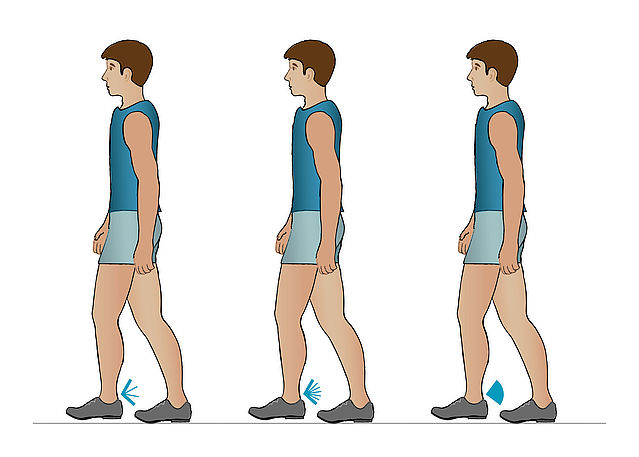
Foot Piece of the Orthosis – Dorsiflexion Stop
-
Step 1/13

Step 2/13
Step 3/13
Step 4/13
Step 5/13
Step 6/13
Step 7/13
Step 8/13
Step 9/13
Step 10/13
Step 11/13
Step 12/13
Step 13/13













-
Foot Piece of the Orthosis – Toe Spring
-
Step 1/4

Step 2/4
Step 3/4
Step 4/4




-
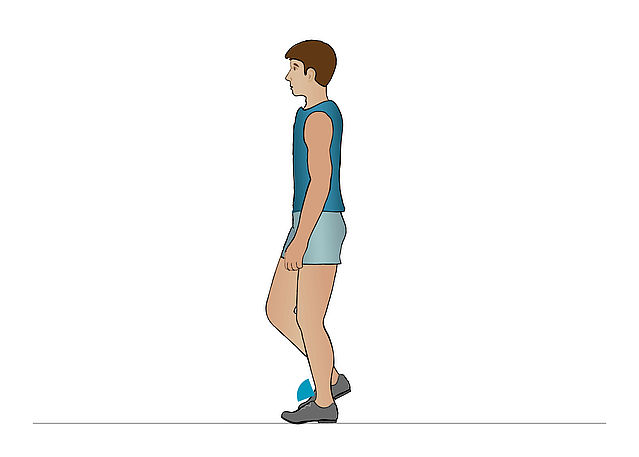
Foot Piece of the Orthosis – Forefoot
-
Step 1/3

Step 2/3
Step 3/3



-
Foot Piece of the Orthosis – Rolling-Off Area
-
Step 1/4

Step 2/4
Step 3/4
Step 4/4




-
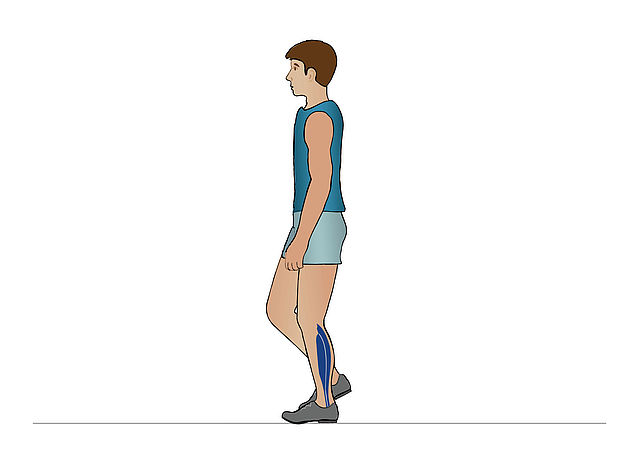
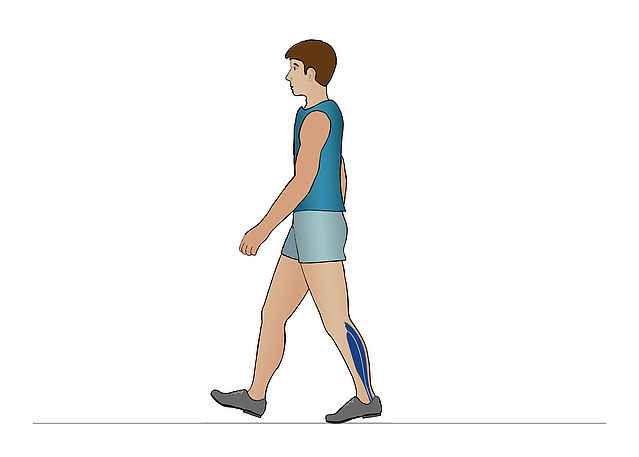
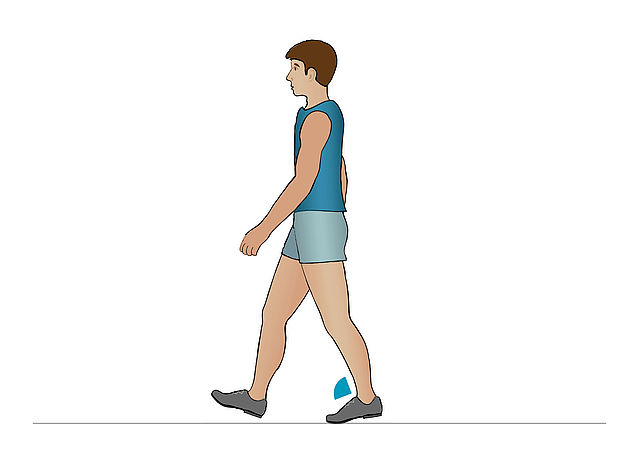
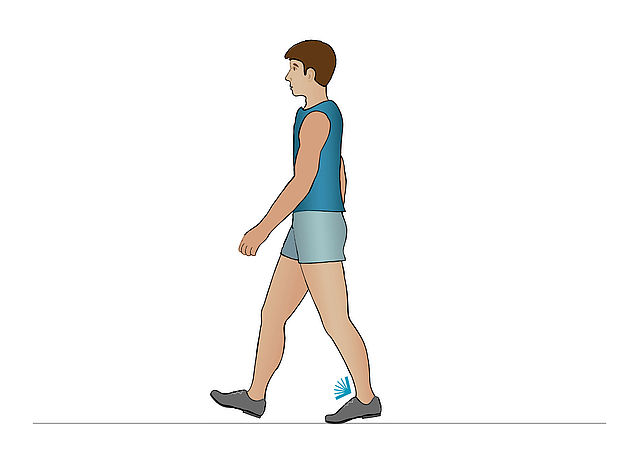
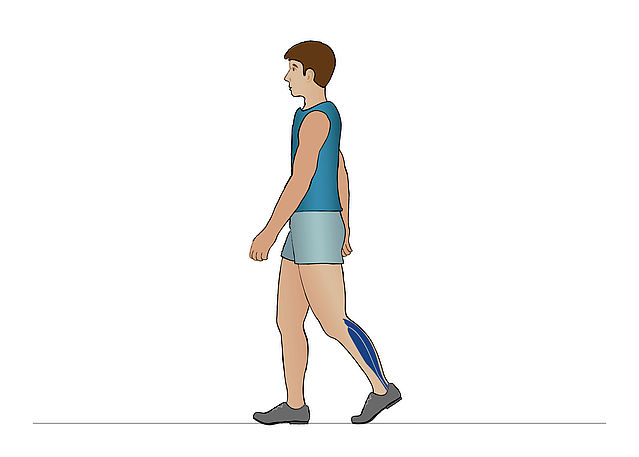
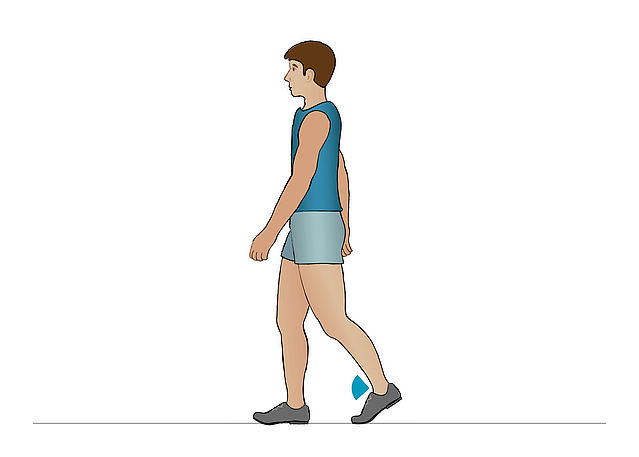
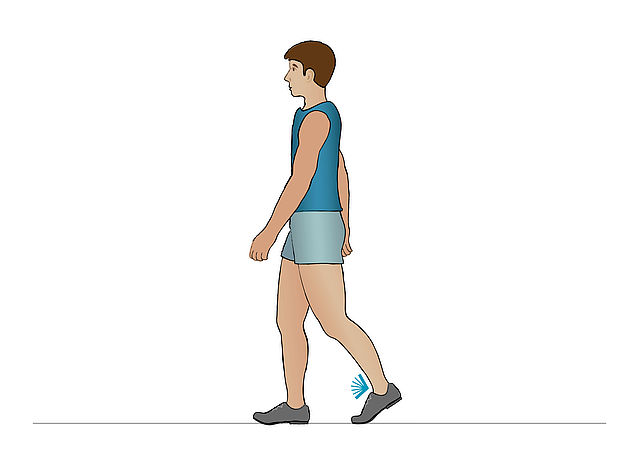
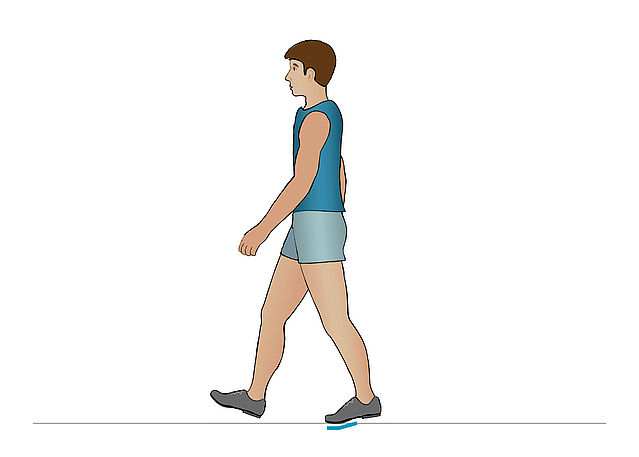
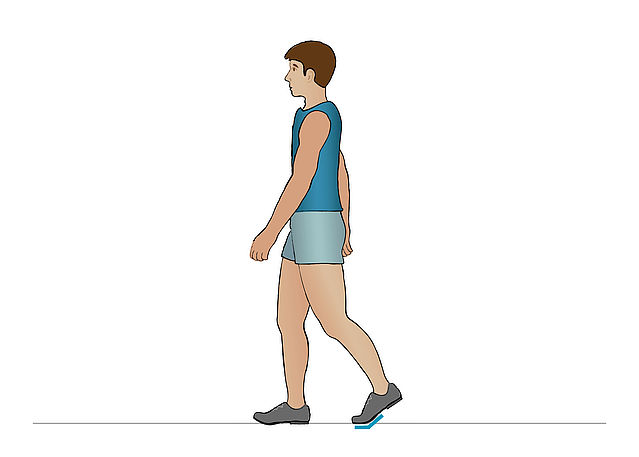
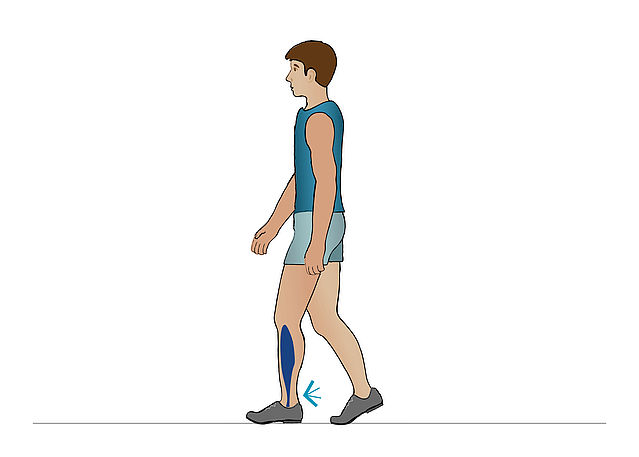
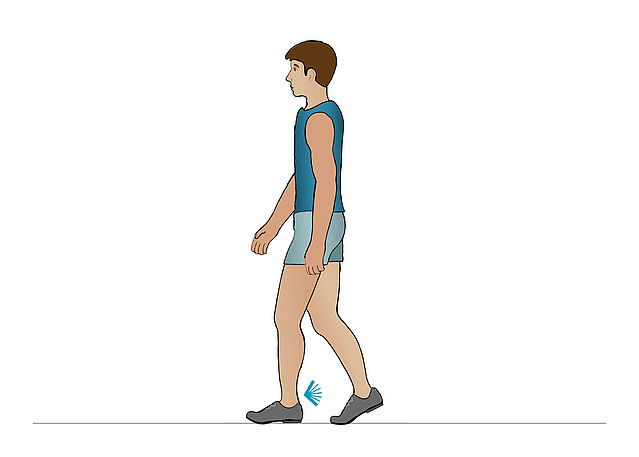
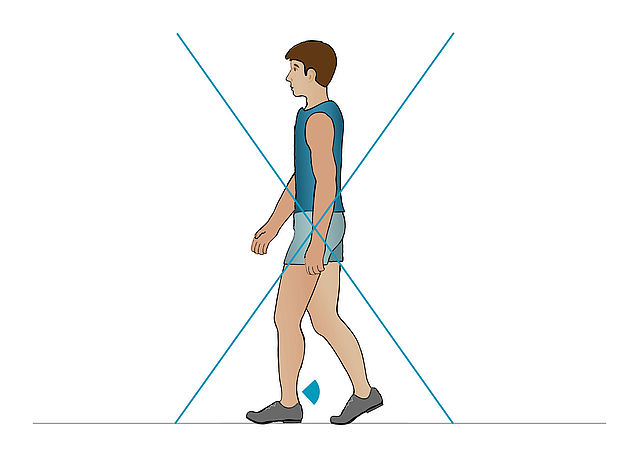
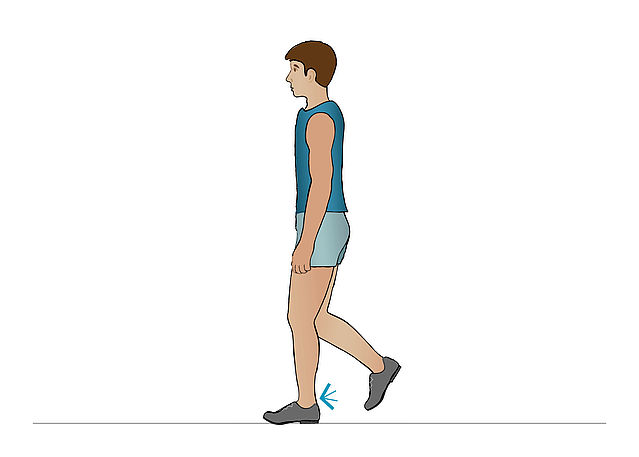
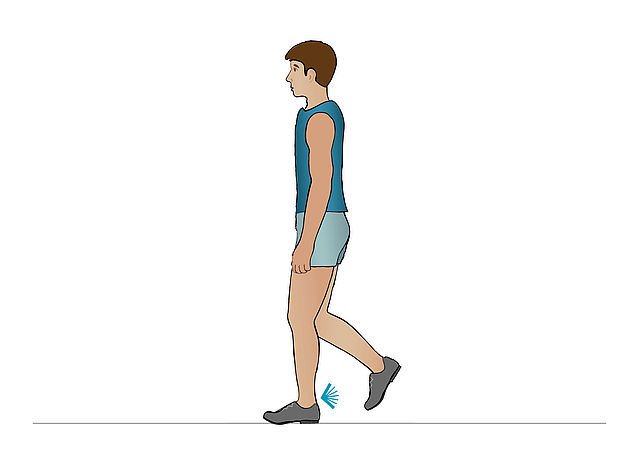
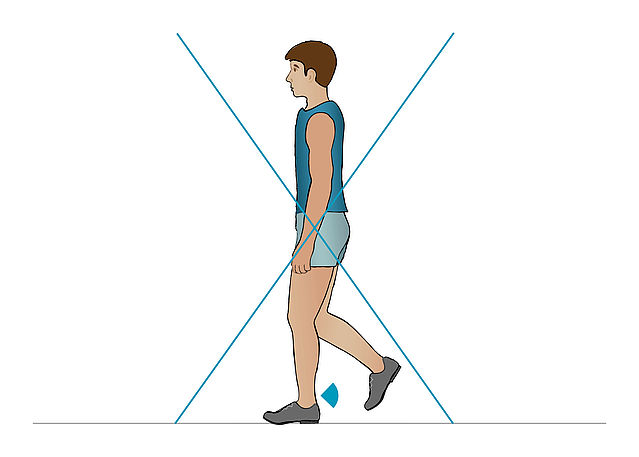
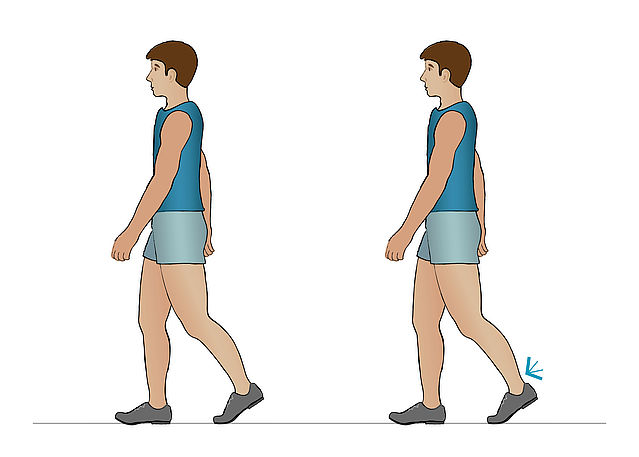
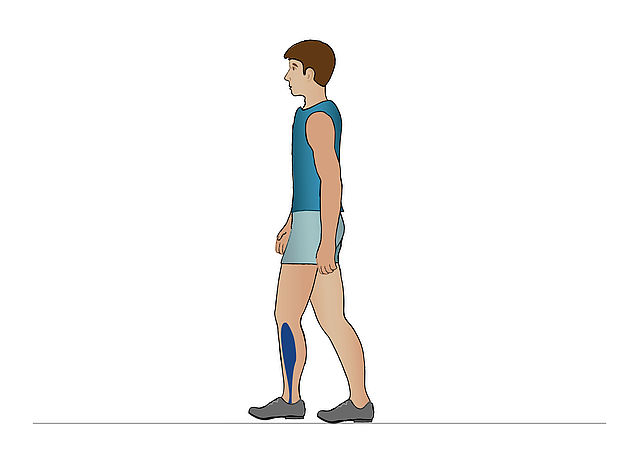
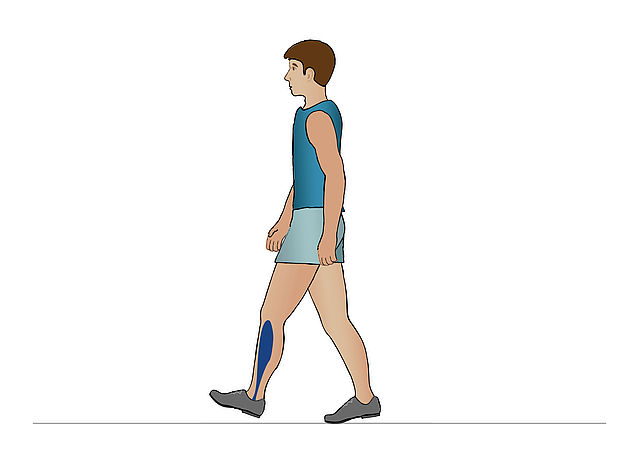
Foot – Heel Lever
-
Step 1/6

Step 2/6
Step 3/6
Step 4/6
Step 5/6
Step 6/6






-
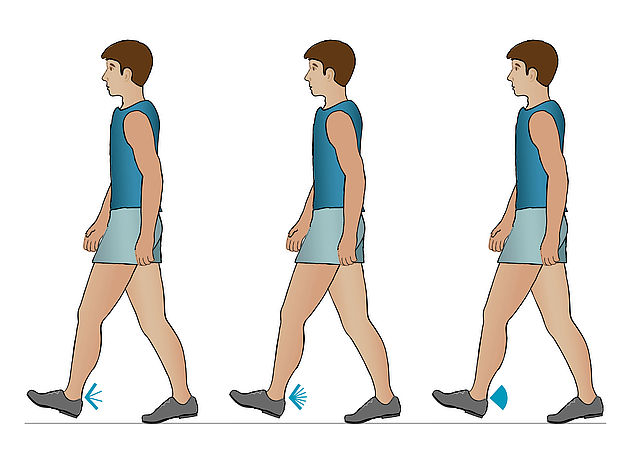
Ankle – Plantar Flexion Stop/Plantar Flexion Limitation
-
Step 1/22

Step 2/22
Step 3/22
Step 4/22
Step 5/22
Step 6/22
Step 7/22
Step 8/22
Step 9/22
Step 10/22
Step 11/22
Step 12/22
Step 13/22
Step 14/22
Step 15/22
Step 16/22
Step 17/22
Step 18/22
Step 19/22
Step 20/22
Step 21/22
Step 22/22






















-
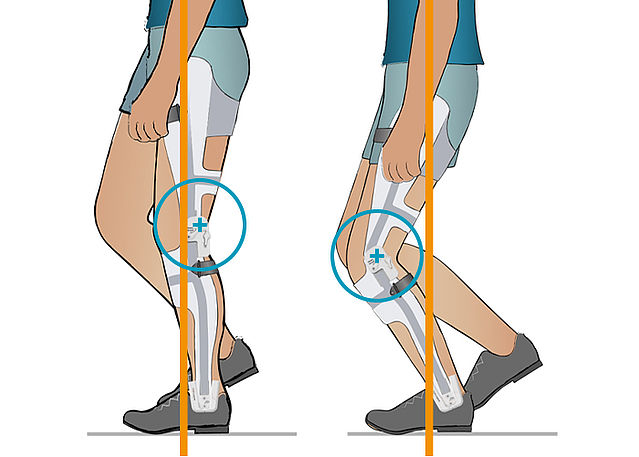
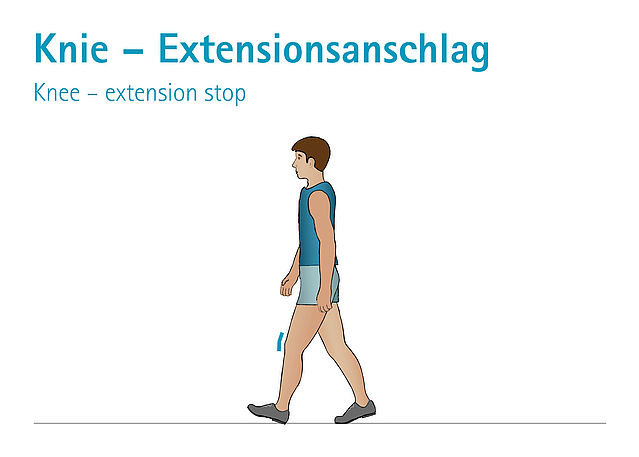
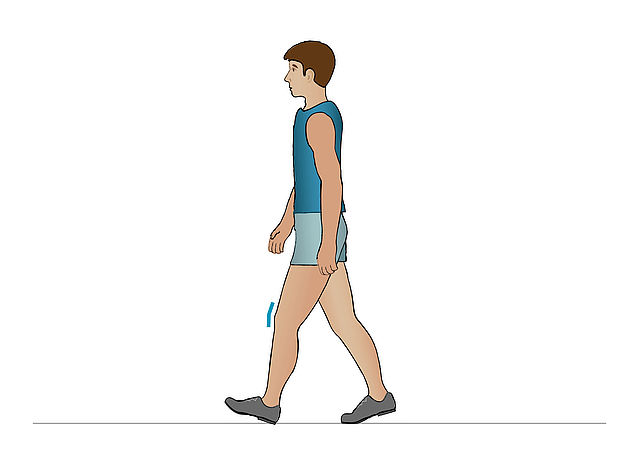
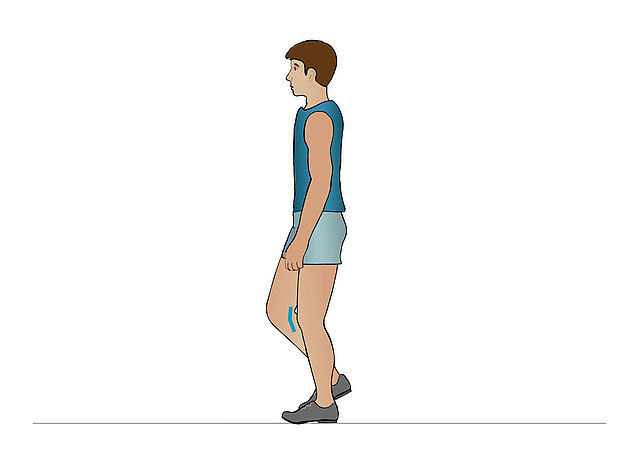
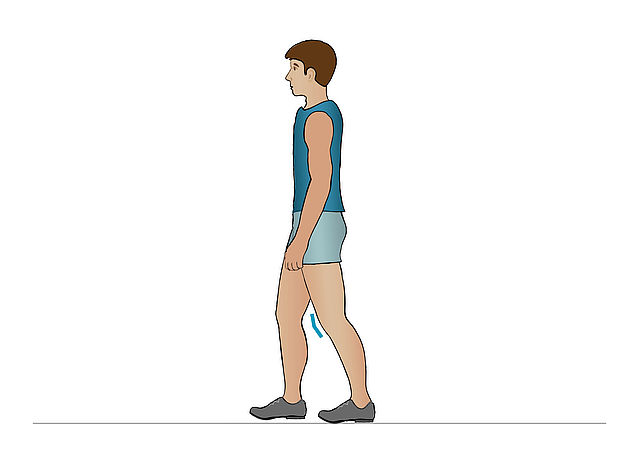
Knee – Extension Stop
-
Step 1/6
Step 2/6
Step 3/6
Step 4/6
Step 5/6
Step 6/6






-
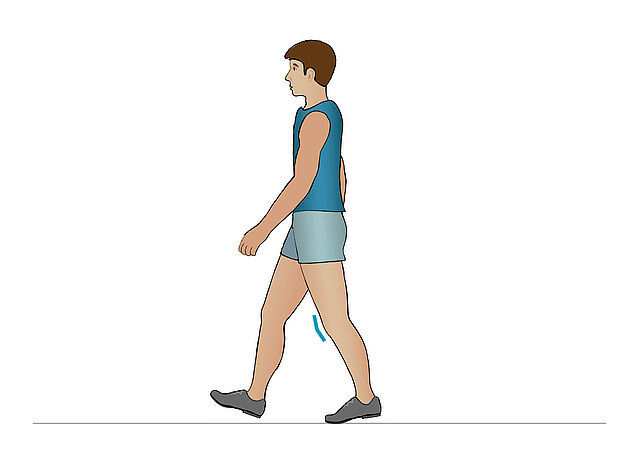
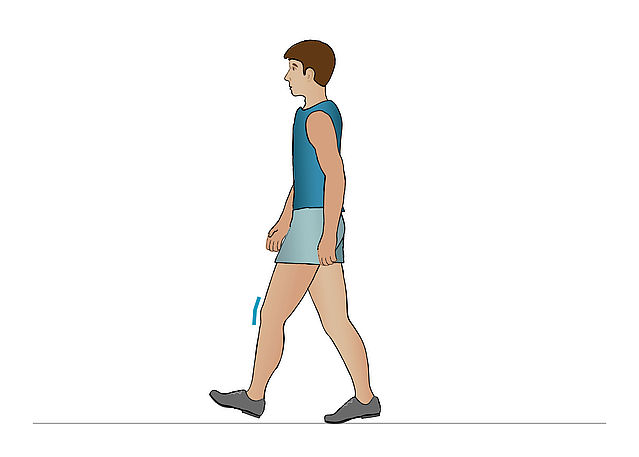
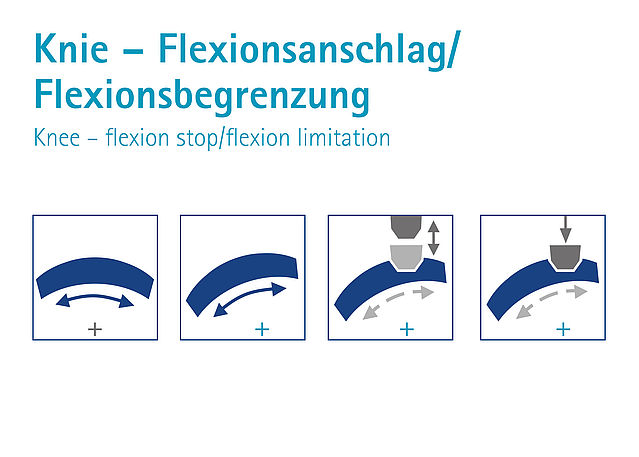
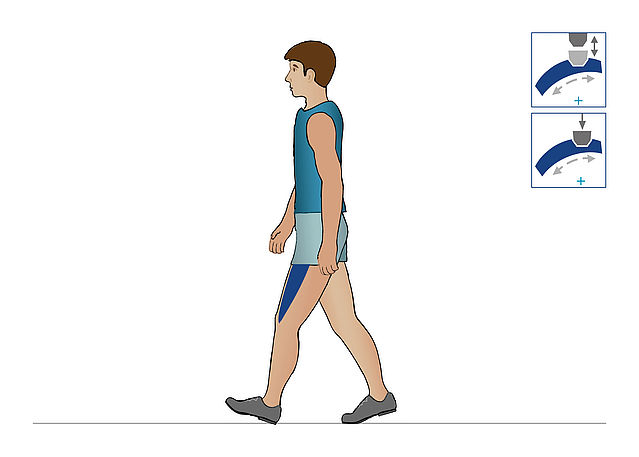
Knee – Flexion Stop/Flexion Limitation
-
Step 1/11
Step 2/11
Step 3/11
Step 4/11
Step 5/11
Step 6/11
Step 7/11
Step 8/11
Step 9/11
Step 10/11
Step 11/11











Last Update: 20 August 2020
FIOR & GENTZ
Gesellschaft für Entwicklung und Vertrieb von orthopädietechnischen Systemen mbH
Dorette-von-Stern-Straße 5
D-21337 Lüneburg
Tel.: +49 4131 24445-0
Fax: +49 4131 24445-57
E-Mail: info(at)fior-gentz.de
Beratung und Technischer Support